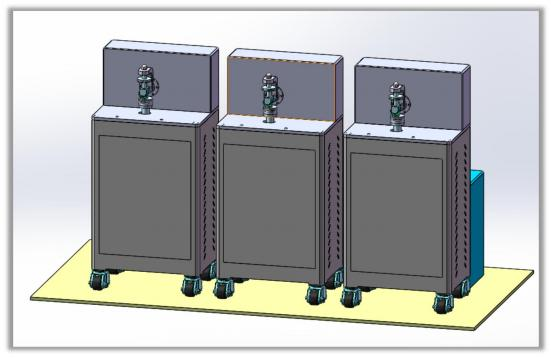
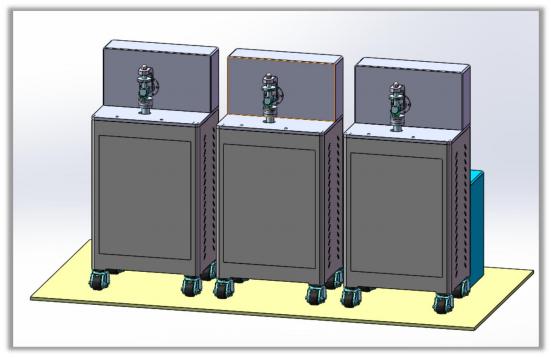
HH3 בודק שחיקת מפרק הברך מורכב משלושה חלקים: מארח בדיקה, מתקן וחלק בקרה אלקטרוני. זה יכול לדמות שחיקה, עייפות וקילוף של שתלי ברך ותהליכי נזק אחרים, ויכול לבדוק 3 מפרקי ברכיים בו-זמנית שתלים.

1 .1 תכונות
בודק שחיקת מפרק הברך HH3 מורכב משלושה חלקים: מארח בדיקה, מתקן וחלק בקרה אלקטרוני. זה יכול לדמות שחיקה, עייפות וקילוף של שתלי ברכיים ותהליכי נזק אחרים, ויכול לבדוק 3 מפרקי ברכיים בו-זמנית שתלים. מכונת בדיקה זו שולטת אוטומטית בכוח הבדיקה, זמן הבדיקה והמהירות, ומודד את כוח הבדיקה והמומנט בזמן אמת. זה ישים לייצור, שימוש ומחקר של תותבות מפרקי הברך ותחומים רפואיים קשורים אחרים.
כונן הציר מאמץ מנוע AC סרוו ומערכת בקרה מיובאים, שיכולים לממש ויסות מהירות ללא מדרגות ואת הנדרש חשב את תפוקת המומנט הקבוע/הכוח הצירי הקבוע בטווח המהירות; כוח הבדיקה מופעל באמצעות מערכת טעינת קפיץ בורג. כוח הבדיקה מופעל באופן קבוע ומהימן, וכוח הבדיקה יכול להיות מוגדר על ידי המפעיל בממשק המחשב; מהירות הציר, הפרמטרים כמו מספר הסיבובים, כוח הבדיקה וזמן הבדיקה נשלטים כולם על ידי מחשב, שיכול לאסוף נתוני בדיקה בזמן אמת ולתכנן אותם. ניתן ליצור את עקומת הבדיקה המתאימה, וניתן לאחסן, לאחזר ולהדפיס את נתוני הבדיקה או העקומה כרצונכם.
מערכת העמסה מונעת מנוע סרוו תלת-כיוונית עם רכיבים שונים עבור AP מלא של מפרק, סיבוב, כיפוף חטיפת ותנועות אחרות, מודול חיישן הכוח בעל ארבעה רכיבים בודק כוח צירי מומנט, דחף אופקי וכיפוף בהתאמה מומנט במהלך הארכה , מכלול סרוו תלת כיווני מצויד במקודד סיבובי דיוק גבוה, מדידת זווית בזמן אמת ותזוזה ו לספק מקור נתונים יעיל לבקרת המחשב המארח.
כל מנגנון תנועה נשלט ומתואם באופן עצמאי, עם שלוש תחנות ו-15 צירים להשלמת השחזה של בדיקת נזקי רכיבי המפרק.
1.2 מפרטים עיקריים
1. תוכנת תפעול מכשירים עם ממשק תפעול סיני.
2. התוכנה המריץ את המכשיר מוכנה לשימוש, אין צורך בתוכנה מיוחדת.
3. דרגות חופש: כל תחנת בדיקה יכולה לממש כיפוף/הרחבה, סיבוב פנימי/סיבוב חיצוני, תנועה קדימה/אחורה, בקרת תנועה תלת מימדית והעמסת כוח צירית, וכל דרגת חופש יכולה להיות מְבוּקָר. גם החיישן וגם הכוח מזוהים; מתאפשרת תנועה חופשית בכיוון פנימה / החוצה ופנימה / החוצה.
4. האי-ליניאריות של החיישן אינה גדולה מ-0.10% מהסקאלה המלאה, וההיסטרזה אינה גדולה מ-0. 10%, יכולת החזרה היא לא יותר מ-0.05% מקנה המידה המלא.
5. טווח חיישן תזוזה ותזוזה: תזוזה צירית 100 מ"מ, כיפוף/מתיחה 120, סיבוב פנימי/סיבוב חיצוני 20, תזוזה קדמית/אחורית 15 מ"מ, תזוזה מדיאלית/צידית 5 מ"מ, היפוך/בחירהוס.
6. קיבולת עומס וטווח חיישן כוח: עומס צירי 3KN , מומנט פנימי / חיצוני 20Nm , עומס קדימה / אחורה 1KN .
7. דיוק בקרת כוח ותזוזה: השגיאה של כוח ומשרעת תזוזה בתוך מחזור אחד לא תחרוג מהמקסימום שצוין. שגיאת הפאזה המקסימלית לא תעלה על 3% מהמחזור המלא. המכשיר נבדק בהתאם ל-ISO 14243-1 ו-ISO 14243-3 בכל דרגת חופש ניתנת לשליטה. עקומות מדודות וערכי סטייה של חיישני כוח ותזוזה.
8. יש לו פונקציית כניסה אנלוגית בעלת שמונה ערוצים וניתן לסנכרן אותו עם נתונים חיצוניים.
9. תדר בדיקה: 1 הרץ, דיוק 0.1 הרץ.
10. מערכת בקרה: היא צריכה להיות מצוידת בבקר סרוו רב-תחנות נפרד, רב-ערוצי, כדי להשיג שליטה אוטומטית במעגל סגור של כוח ותזוזה.
11. הבקר אמור להיות מסוגל לבצע פיצוי בקרת ערך שיא לעמק כדי להבטיח שניתן להגיע במדויק לערך השיא הנדרש על ידי האות כאשר צורת גל מחזורית משמשת כהוראת בקרה.
12. זה אמור להיות מסוגל ליישם בדיקות תכנות של עקומות הליכה מותאמות אישית; להיות מסוגל לבצע שליטה ידנית שלב אחר שלב בכל דרגת חופש הניתנת לשליטה; ולהיות מסוגל לייצא נתונים גולמיים בפורמט אקסל.
13. במהלך הבדיקה, התוכנה צריכה להיות מסוגלת לשקף את עקומות הכוח והתזוזה של כל תחנה בזמן אמת, ואת מערכת הבקרה. המערכת אמורה להיות מסוגלת להתאים אוטומטית את עקומת התנועה של המדגם כך שתתאים לעקומת היעד ללא התערבות ידנית.
14. קצב בקרה בלולאה סגורה בזמן אמת ≤ 6kHz, למעט מצב בקרת כוח ותזוזה, הבקר אמור להיות מסוגל ליישם את מצב הבקרה המשתנה המחושב.
15. תדירות הדגימה הדיגיטלית לא צריכה להיות פחות מ-100 קילו-הרץ, ושיטת הדגימה צריכה לכלול: ערך שיא, ערך עמק, זמן זמן, מקסימום, מינימום, ממוצע, מחזור/לוגריתם וכו'.
16. יש לו מצב כפול, מצב עבודה של פקודות ערוץ הגבלת משוב ערוץ.
17. יש לו את הפונקציה של בדיקה עצמית של עירור החיישן חסר .
18. טמפרטורה: ניתן לשמור על טמפרטורת מדיום הסיכה ב-(37 ℃) ויש מערכת בקרת טמפרטורה.
19. מדיום סיכה: ניתן לטבול את משטח המפרק בתווך הסיכה, ויש לאטום את המדיום ללא דליפה; ומצויד במכשיר ניטור נזילות.
20. רכיבי בדיקה: מצויד בכלים הדרושים לבדיקה, טעינת תחנות עבודה וטעינה עבור כל התנועות. עמדת הטבילה מספקת דוגמאות סטנדרטיות לכיול ציוד ופתרון בעיות.
21. לחצן עצירת חירום: הציוד צריך להיות מצויד בלחצן עצירת חירום.
22. הגנת בטיחות: הציוד צריך להיות מצויד בכיסוי מגן מחומר פוליקרבונט תרמופלסטי שקוף ושקוף; יש מתקן נעילת בטיחות. כאשר דלת מכסה המגן נפתחת, הציוד אמור להיות מסוגל להפסיק אוטומטית את הבדיקה.
1.3 תנאי עבודה
בטמפרטורת החדר בטווח של 10 ℃~ 35 ℃;
הלחות היחסית אינה עולה על 80%;
התקנה נכונה על בסיס מוצק;
בסביבה נקייה ללא רעידות, מדיה קורוזיבית והפרעות שדה אלקטרומגנטיות חזקות;
טווח התנודות של מתח אספקת החשמל לא יעלה על המתח הנקוב  10% .
10% .
2. הרכב מבני
מכונת הבדיקה מחולקת לשלוש תחנות עבודה, שהן מערכת הנעת הציר, מערכת הטעינת המדגם והכוח הצירי. שלוש תחנות העבודה חולקות את אותו הינע ציר. מערכת דינאמית ומערכת בקרת תוכנה.
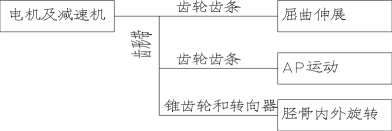
מערכת הנעה 2.1 ציר
מנוע הציר משתמש במערכת ובמנוע משולבת סרוו של Panasonic AC. הספק המנוע המרבי הוא 7.5 קילוואט, ההספק שלו מחולק ל-3 קווי פלט.
הראשון: אחרי מתלה ההילוכים, המצמד האלקטרומגנטי וחיישן המומנט, הוא הופך למטוטלת המסתובבת של עצם הירך המצמד האלקטרומגנטי אחראי על שליטה בהפעלה וכיבוי, וחיישן המומנט אחראי על מדידת המומנט. מדוד את המומנט במהלך הפעולה.
השני: לאחר שהוא עובר דרך חגורת השיניים ומתלה ההילוכים, הוא הופך לתרגום שמאל וימין, ומניע את תנועת ה-AP לדוגמה.
השלישי: דרך חגורת השיניים, גלגל השיניים וגלגל ההיגוי, הוא הופך לתנופה הסיבובית של השוקה, ומניע את הדגימה להסתובב פנימה והחוצה.
נתיב השידור מוצג באיור למטה.
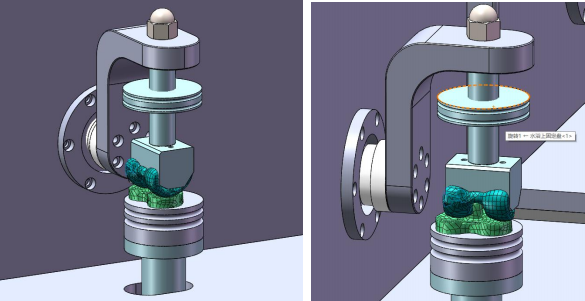
2.2 מערכת טעינה לדוגמה
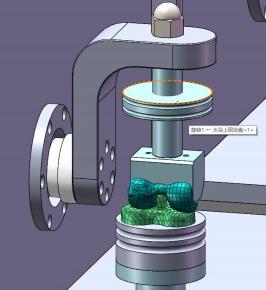
מערכת טעינת דגימות מדמה את חופש התנועה בתנאים אנושיים עבור רכיבי השתל של מפרק הברך. היא מותקנת ומקובעת. הוא מורכב ממושב הרכבה, מושב הזזה, מושב ניילון, רולר, שרוול הזזה וכו'.
היישום הספציפי הוא כדלקמן:
ההתקנה של כלי השחיקה של מפרק הברך היא מסובכת יחסית. אנא התקן אותו אך ורק לפי התרשים. בנוסף, מצורפים הערוצים המתאימים.
אנא השתמש במספר החוט המתאים בעת חיבור החוטים.
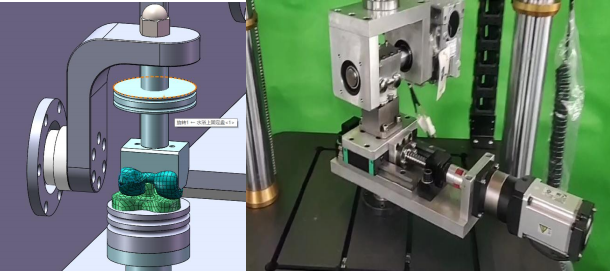
(המבנה המוצג באיור משמש רק כדי להדגים את עקרון התנועה, האובייקט בפועל ינצח)
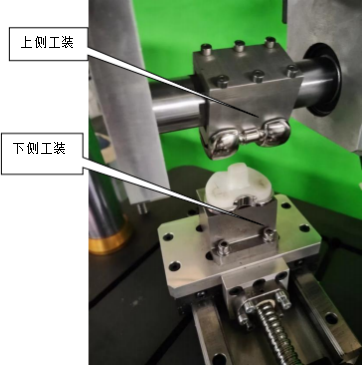

(המבנה המוצג באיור משמש רק כדי להדגים את עקרון התנועה, האובייקט בפועל ינצח)
עליך לעבד מחדש את הציוד העליון והתחתון בהתאם לדוגמא כדי לעמוד בדרישות הבדיקה. (פרטי כל גודל מוצר משתנים)

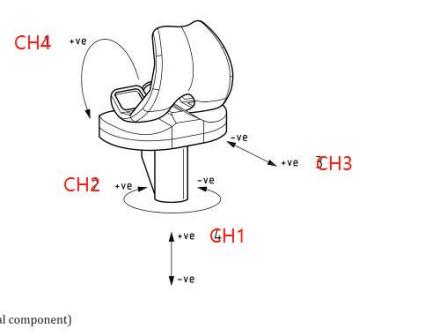
6. בחירת ערוצים והתאמות קשורות
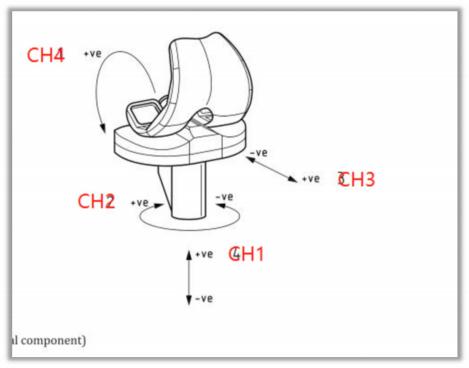
בשילוב עם התמונה למעלה, בדוק איזה ערוץ עובד על ידי בדיקת הערוץ. בעת ביצוע ISO 14243.3 , בחר 1-4 מעבר , ערוץ 5 הוא ערוץ הרחבה לשדרוגים הבאים. עבור ניסויים אחרים עם צירים בודדים או דו-ציריים, אנא בחר את הערוץ המתאים.
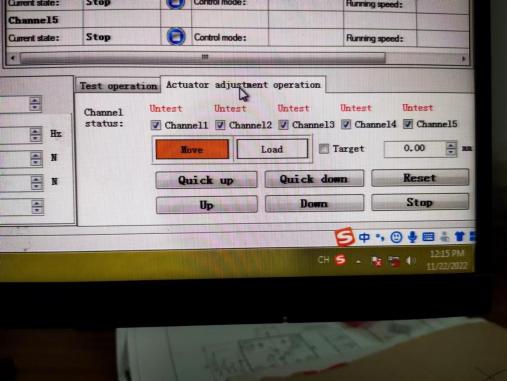
מעלה/מעלה מהירה = טעינה/טעינה מהירה
ירידה/ירידה מהירה = ירידה/ירידה מהירה
7. בהתאם ל-ISO 14243.3, יש צורך לייבא את צורת גל הבקרה, כפי שמוצג באיור:
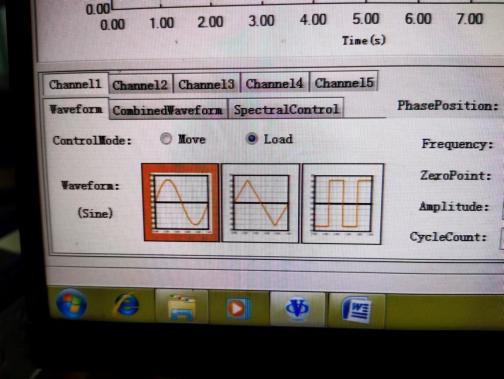
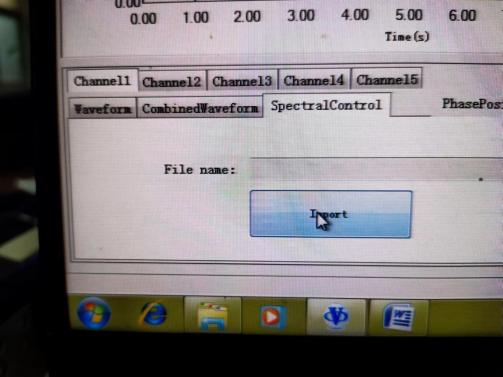
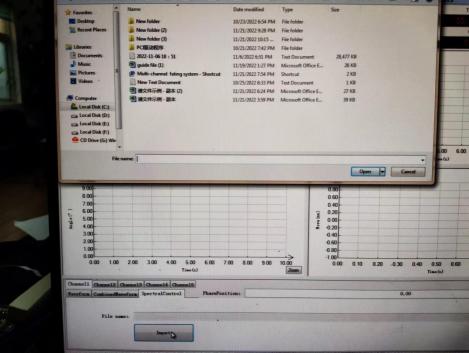
בחר את צורת הגל שהוגדרה מראש על ידי היצרן. אם אתה צריך להגדיר צורת גל או פעולה חדשה, תוכל לעשות זאת בקובץ זה. שנה ושמור תחת שם אחר.
להתאמות מפורטות עבור כל ערוץ, עיין במדריך התוכנה החד-ערוץ.
8. על הגנה:
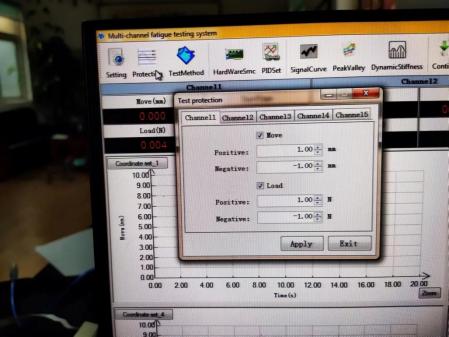
הניסוי לא זז או לא ניתן להפעיל לאחר לחיצה על התחל, בדוק אם יש פרמטרים כלשהם שנקבעו מחוץ לסובלנות באפשרויות ההגנה.
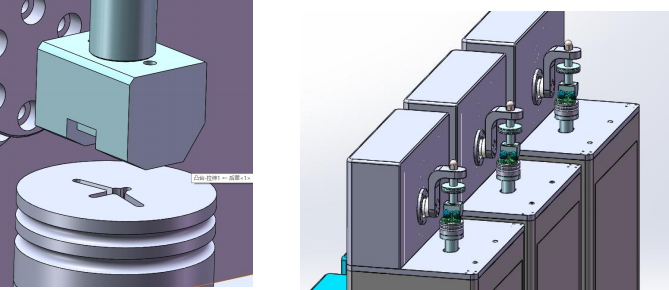
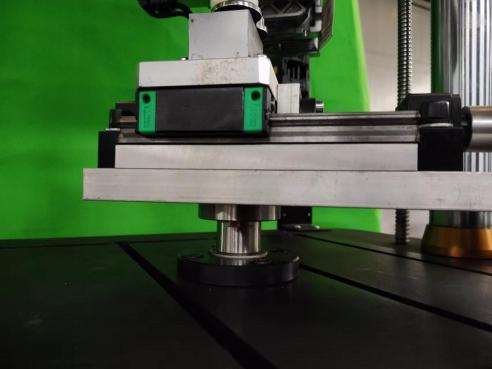
2.3 מערכת טעינת כוח צירית
מכונה זו מאמצת מבנה טעינת קפיץ. מנגנון הטעינה מונע על ידי מנוע צעד, אשר מועבר דרך חגורת שיניים קשתית מעגלית, גלגלת סינכרונית וזוג ברגים כדוריים מדויקים, ומונחה על ידי מסילה מכוונת לתנועה ליניארית מדויקת להנעת מושב הפעלת הכוח. מושב הפעלת הכוח קבוע עם מנגנון קפיצי, אשר מפעיל כוח על פלטפורמת ההזזה לאחר דחיסת הקפיץ. נוצר כוח הבדיקה בין משטחי החיכוך של דגימת הרולר. על ידי שליטה במנוע כדי להניע את מושב הכוח לנוע קדימה ואחורה בחלל, כלומר, ניתן לשלוט ביישום ובגודל כוח הבדיקה. חיישן עומס מותקן במישור מושב הפעלת הכוח. אסוף אותות כוח. מנחה נושא תנועה ליניארי מבטיח יישום ויציבות של כוח הבדיקה. חלק טעינת קפיץ קל לטעינה ולפריקה.
כאשר כוח הבדיקה מתחיל לטעון, החיישן יזין את הלחץ שנקבע מראש למערכת בקרת המיקרו-מחשב ואת הלחץ שנקבע מראש. לאחר מכן, המיקרו-מחשב שולט במנוע לאחור עד שלחץ המערכת מאוזן עם הלחץ שנקבע מראש.
2.4 מערכת השריית עומס
של קופסת נוזל טבילה, תנור חימום, חיישן טמפרטורה, משאבה פריסטלטית, צינור סיליקון וכו'.
לקוחות יכולים לעבד חורי מיקום על משטח הקצה הגלילי בהתאם לגודל האמיתי של המדגם, וזווית ההידוק ניתנת להתאמה. לאחר כוונון הזווית, נעל את מחוון המיקום השמאלי.



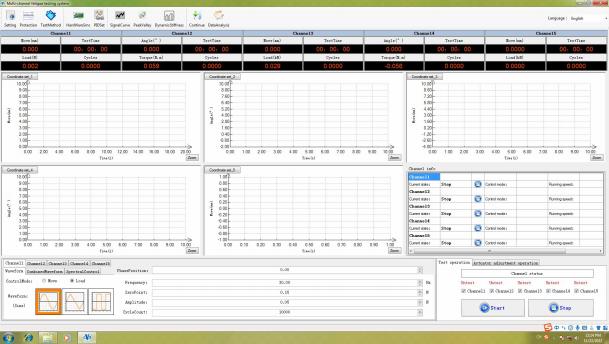
2.5 מערכת בקרת תוכנה
מערכת הבקרה מותקנת על מכונת הבקרה ומחוברת למארח הבדיקה באמצעות כבל תקשורת. סביבת ההפעלה של התוכנה היא WINDOWS XP. תוכנת הבקרה היא ממשק פעולה אינטראקטיבי גרפי, שאחראי על שליחת הוראות לשליטה בהפעלה והעצירה של המערכת, מהירות הפעולה, כוח הטעינה, טמפרטורת נוזל הטבילה ואיסוף נתוני פעולת המערכת כגון כוח צירי, מומנט, טמפרטורה, זמן בדיקה וכו' במהלך המבחן. לאחר חישוב ועיבוד, עקומות הכוח-זמן, המומנט ועקומות נתונים אחרות מופקות בצורה של תרשימים.
בשילוב עם התמונה למעלה, בדוק את הערוץ כדי לאשר איזה ערוץ עובד. בעת הפעלת ISO 14243.3, בחר 1-4 ערוצים, 5 t הערוץ הוא ערוץ הרחבה לשדרוגים הבאים. לניסויים אחרים בציר אחד או בציר כפול, אנא בחר את הערוץ המתאים.
העלאה/עלייה מהירה = טעינה/טעינה מהירה
הורדה/ירידה מהירה = הסרה/הסרה מהירה של התקנה
7. בהתאם ל-ISO 14243.3, יש צורך לייבא את צורת גל הבקרה, כפי שמוצג באיור:
בחר את צורת הגל שהוכנה מראש על ידי היצרן. אם אתה צריך להגדיר צורת גל או פעולה חדשה, אתה יכול לשנות אותה בקובץ זה. שמור תחת שם אחר.
להתאמות מפורטות עבור כל ערוץ, עיין במדריך התוכנה החד-ערוץ .
8. על הגנה:
הניסוי לא זז או לא ניתן להפעיל לאחר לחיצה על התחל, בדוק אם יש פרמטרים כלשהם שנקבעו מחוץ לסובלנות באפשרויות ההגנה.